Trung tâm Nghiên cứu Khoa học Quốc gia Pháp và Đại học Hong Kong phát triển thành công Da robot chi phí thấp Giải tách lực 3D
Vn-Z.vn Ngày 23 tháng 11 năm 2024, Xúc giác là một hình thức nhận thức quan trọng giúp con người cảm nhận và tương tác với môi trường bên ngoài. Hiện nay, các nhà khoa học đang chế tạo da mềm dẻo với mục tiêu mang lại khả năng này cho robot, giúp chúng thực hiện các thao tác khéo léo và phức tạp hơn, chẳng hạn như tự động điều chỉnh để kẹp chắc một quả trứng mà không làm vỡ.
Hiện nay, các loại cảm biến xúc giác linh hoạt phổ biến bao gồm:
• Cảm biến thị xúc giác: Được sử dụng rộng rãi trong nghiên cứu, cung cấp hình ảnh xúc giác có độ phân giải cao.
• Cảm biến xúc giác dựa trên áp trở hoặc điện dung: Có khả năng phát hiện phân bố áp lực và dễ dàng chế tạo.
Một vấn đề lớn với các cảm biến này là làm thế nào để sử dụng cấu trúc cảm biến đơn giản và phương pháp hiệu chuẩn hiệu quả để giải tách lực 3D (ba chiều). Điều này rất quan trọng, nhưng hiện nay, hầu hết các cảm biến vẫn có cấu trúc phức tạp, cần quá trình hiệu chuẩn tốn nhiều thời gian, khiến cho việc ứng dụng rộng rãi bị hạn chế.
Nhằm giải quyết vấn đề trên, các nhà nghiên cứu từ Trung tâm Nghiên cứu Khoa học Quốc gia Pháp (CNRS) và Đại học Hong Kong đã đề xuất một loại cảm biến xúc giác mới dựa trên màng từ linh hoạt.
• Bằng cách thiết kế mảng Halbach với từ hóa trực giao, cảm biến này có thể tự động giải tách lực 3D.
• Giải pháp giúp giảm độ phức tạp trong quá trình hiệu chuẩn từ bậc ba xuống bậc nhất, đơn giản hóa cấu trúc cảm biến và quy trình hiệu chuẩn.
Công nghệ này mở ra hướng đi mới cho các cảm biến xúc giác chi phí thấp, giúp dễ dàng ứng dụng vào thực tế. Đây là một bước tiến quan trọng trong việc phát triển các hệ thống robot với khả năng cảm nhận và tương tác linh hoạt hơn.
Kết quả nghiên cứu này đã được công bố trên tạp chí con của Nature là Nature Machine Intelligence với tiêu đề: “A soft skin with self-decoupled three-axis force-sensing taxels” (Da mềm với các điểm cảm biến lực ba trục tự giải tách).
Da xúc giác mềm tự giải tách lực ba chiều
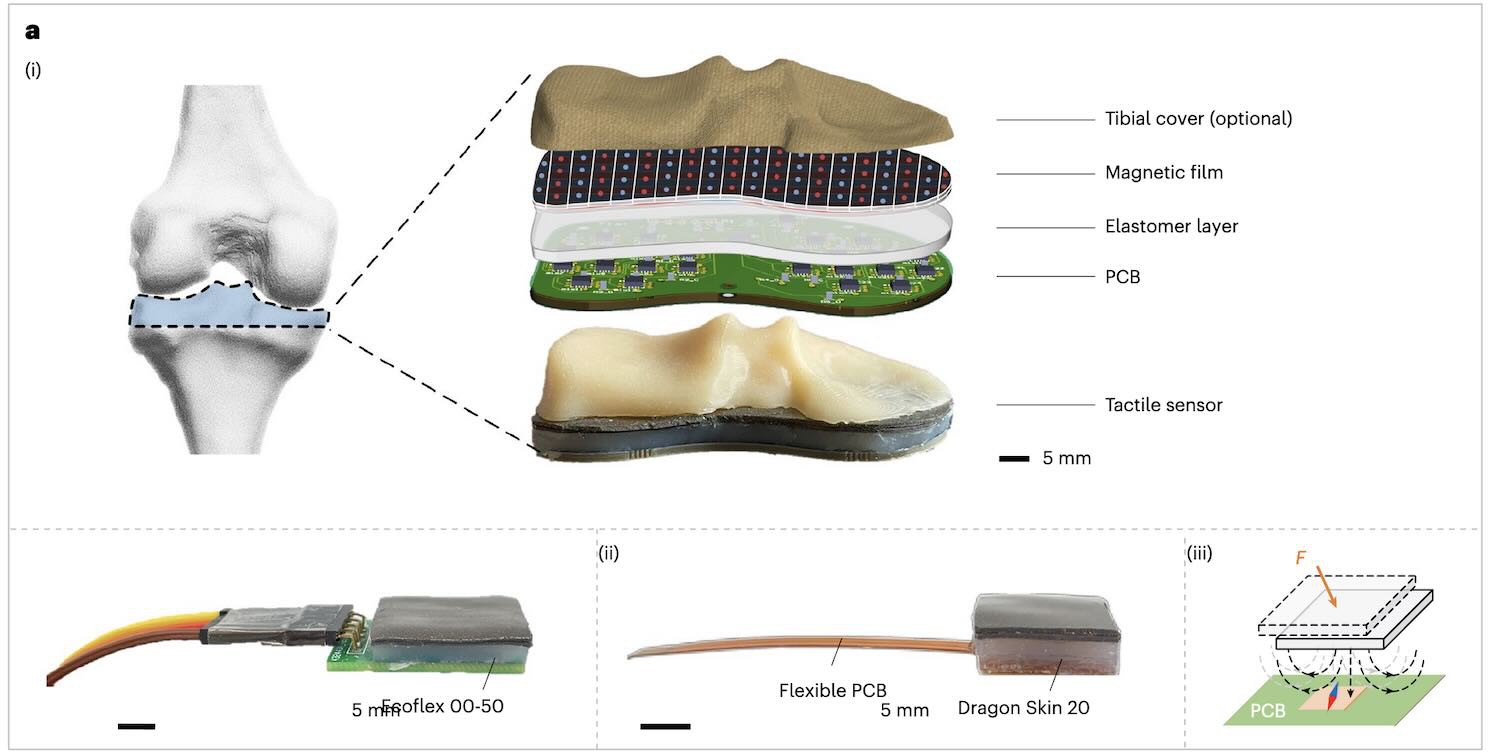
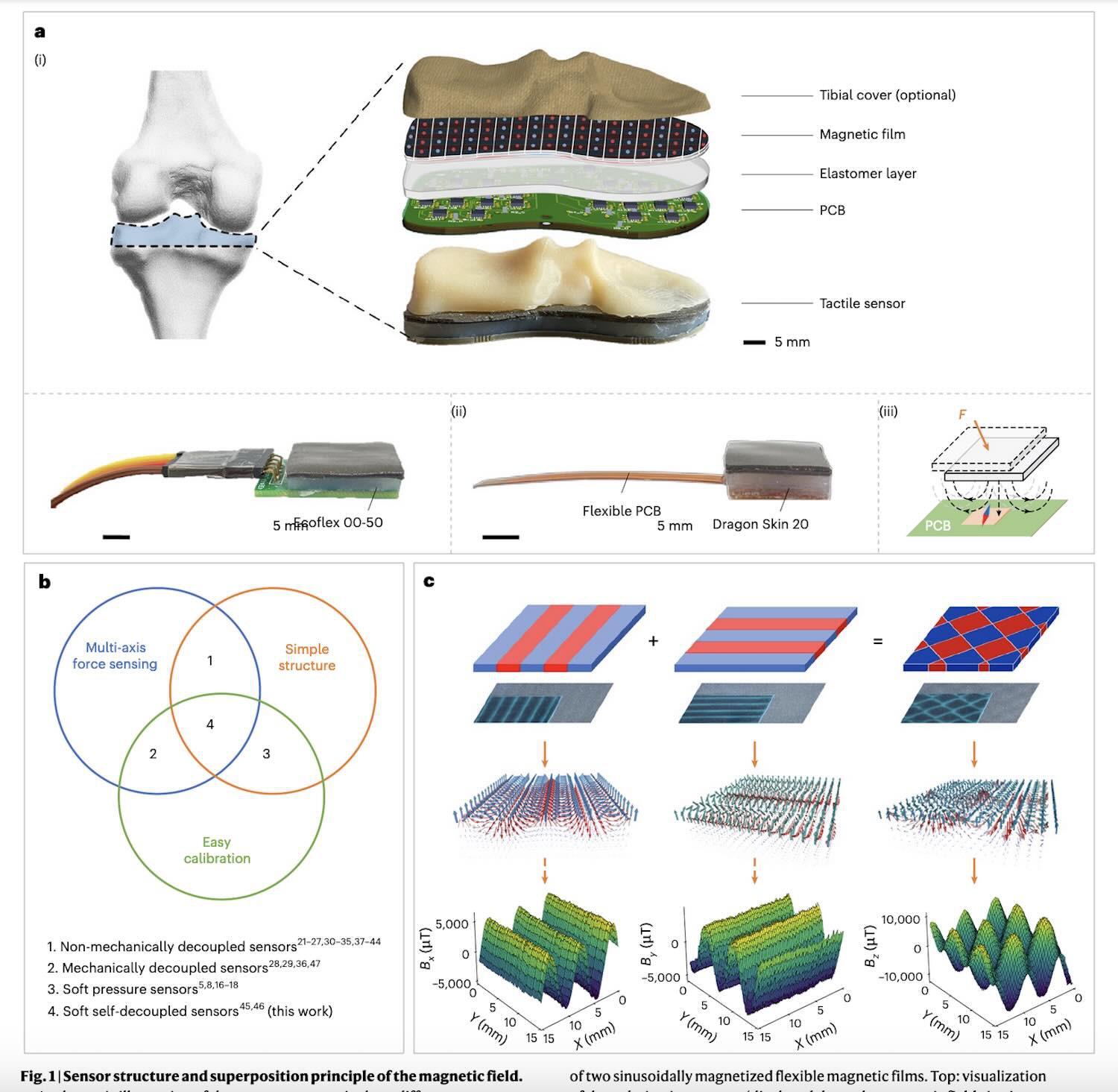
Như được minh họa trên, phần chính của cảm biến xúc giác này được chia thành ba lớp từ trên xuống dưới:
1. Màng từ mềm
2. Lớp silicon đàn hồi
3. Bảng mạch PCB (tích hợp cảm biến Hall).
Khi màng từ biến dạng dưới tác động của lực bên ngoài, khoảng cách giữa màng từ và cảm biến Hall sẽ thay đổi. Do đó, cường độ và hướng của từ trường đo được bởi cảm biến Hall cũng thay đổi theo. Thông tin từ trường ba chiều này, sau khi được xử lý bằng thuật toán giải tách, có thể được chuyển đổi thành thông tin lực ba chiều.
Các nghiên cứu trước đây đã chỉ ra rằng mảng Halbach từ hóa sóng sin đa cực một mặt có đặc tính tự giải tách hai chiều. Cụ thể, trong mặt phẳng x-z:
• Cường độ từ trường (B) chỉ phụ thuộc vào hướng z.
• Hướng từ trường (RB) chỉ phụ thuộc vào hướng x.
Nhờ đặc tính này, Halbach có thể được sử dụng để tự giải tách lực trong hai chiều.
Do từ trường tuân theo nguyên lý chồng chất, các nhà nghiên cứu đã phát hiện rằng, khi xếp chồng trực giao hai mảng Halbach từ hóa sóng sin, đặc tính tự giải tách lực hai chiều có thể được mở rộng lên ba chiều trong những điều kiện nhất định thông qua các phép đơn giản hóa.
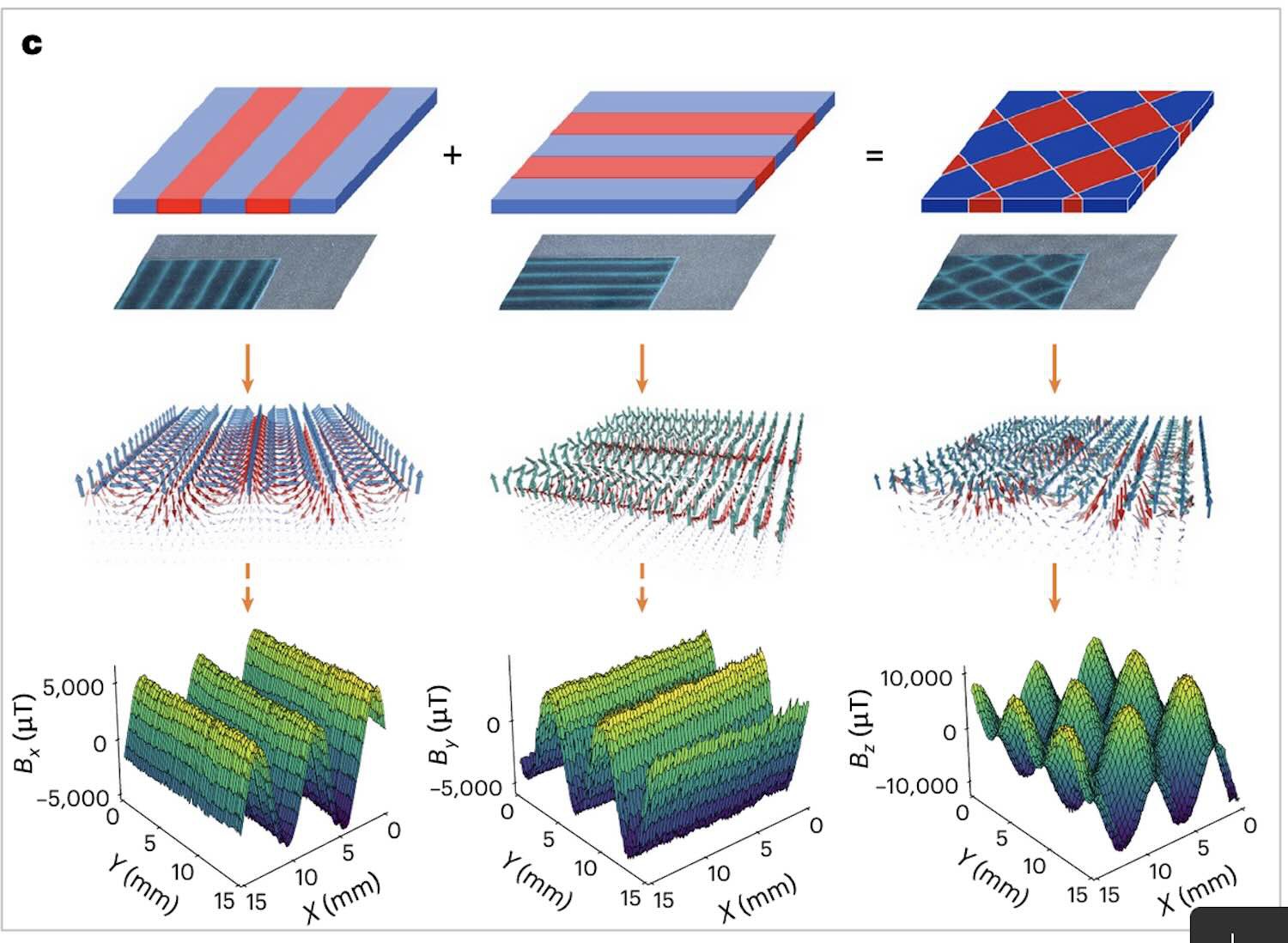
Tức là B chỉ phụ thuộc vào hướng z, Rxz chỉ phụ thuộc vào hướng x, và Ryz chỉ phụ thuộc vào hướng y. Độ sai số tuyệt đối chuẩn hóa (NAE) trước và sau khi đơn giản hóa của B, Rxz, Ryz lần lượt là 2.88%, 3%, và 4.56%.
Dựa trên đặc tính tự giải tách ba chiều của mảng Halbach từ hóa trực giao, ba thành phần lực ba chiều Fz, Fx, và Fy có thể được giải tách tương ứng thông qua các thông số B, Rxz, và Ryz.
Để kiểm chứng tính khả thi của phương pháp tự giải tách lực ba chiều này, các nhà nghiên cứu đã thiết kế và chế tạo ba cảm biến xúc giác có hình dạng, kích thước, dải đo và độ nhạy khác nhau, nhằm đáp ứng các ứng dụng thực tiễn đa dạng.
Đo phân bố lực ba chiều trên khớp gối nhân tạo
Ứng dụng đầu tiên là đo lường phân bố lực ba chiều tại vị trí khớp gối nhân tạo.
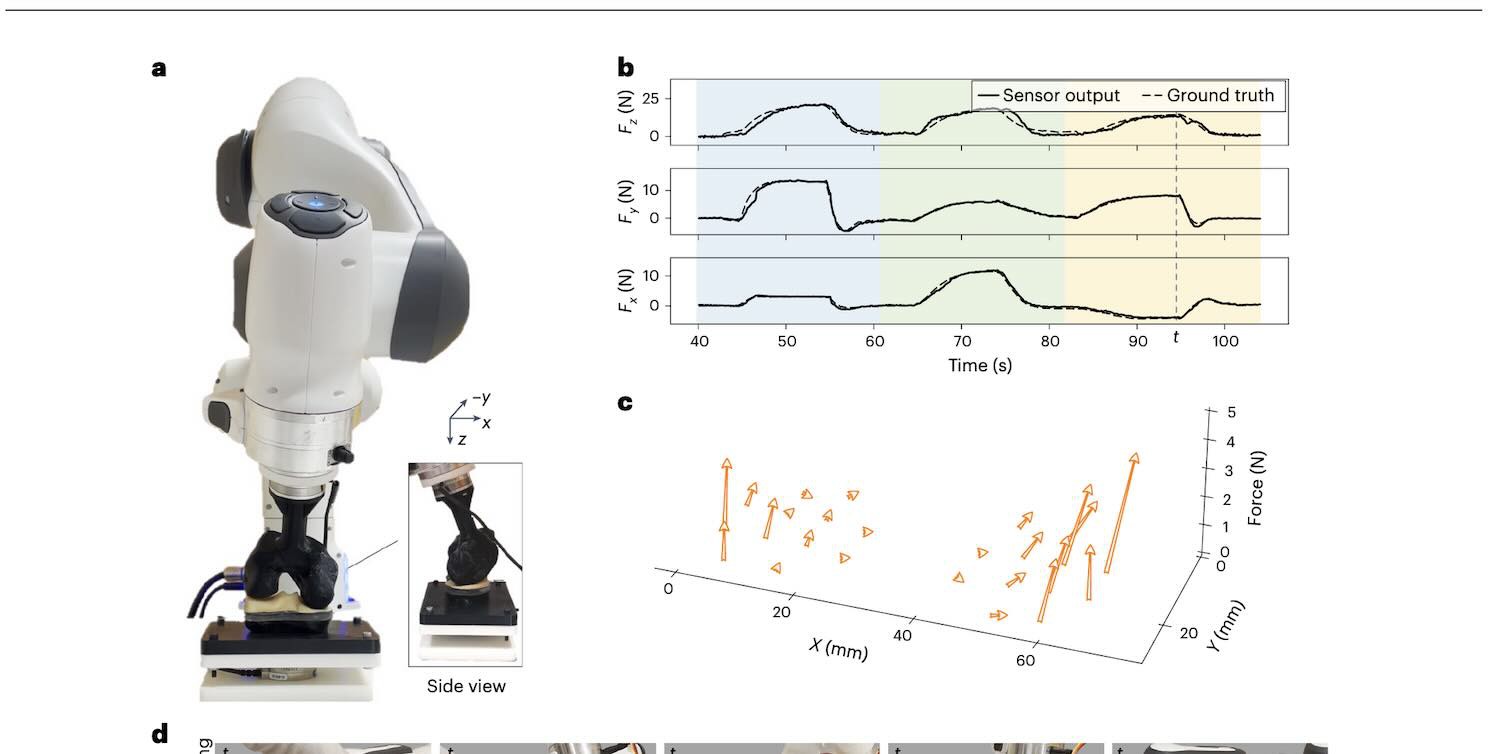
Khớp gối được chế tạo bằng công nghệ in 3D, gồm hai phần:
• Phần dưới tích hợp cảm biến xúc giác (gồm 24 đơn vị cảm biến) và cảm biến lực/mô-men sáu chiều ATI.
• Phần trên được điều khiển bởi cánh tay robot để mô phỏng chuyển động gập và trượt của khớp gối người.

Các thí nghiệm cho thấy cảm biến xúc giác có thể cung cấp các phép đo phân bố lực ba chiều theo thời gian thực với sai số rất nhỏ giữa lực tổng đo được và giá trị thực (từ cảm biến ATI).
Robot haptic làm cà phê
Một ứng dụng khác là dạy robot làm cà phê dựa trên cảm giác xúc giác.
Như minh họa trong hình dưới đây, các nhà nghiên cứu đã lắp đặt một mảng cảm biến xúc giác 3x3 có khả năng phát hiện lực và mô-men tại một đầu của gắp cơ học (điểm đo mô-men là trung tâm của cảm biến). Khi người vận hành chạm nhẹ hoặc trượt trên bề mặt của cảm biến, cảm biến sẽ phát hiện được lực và mô-men tương ứng theo hướng đó.
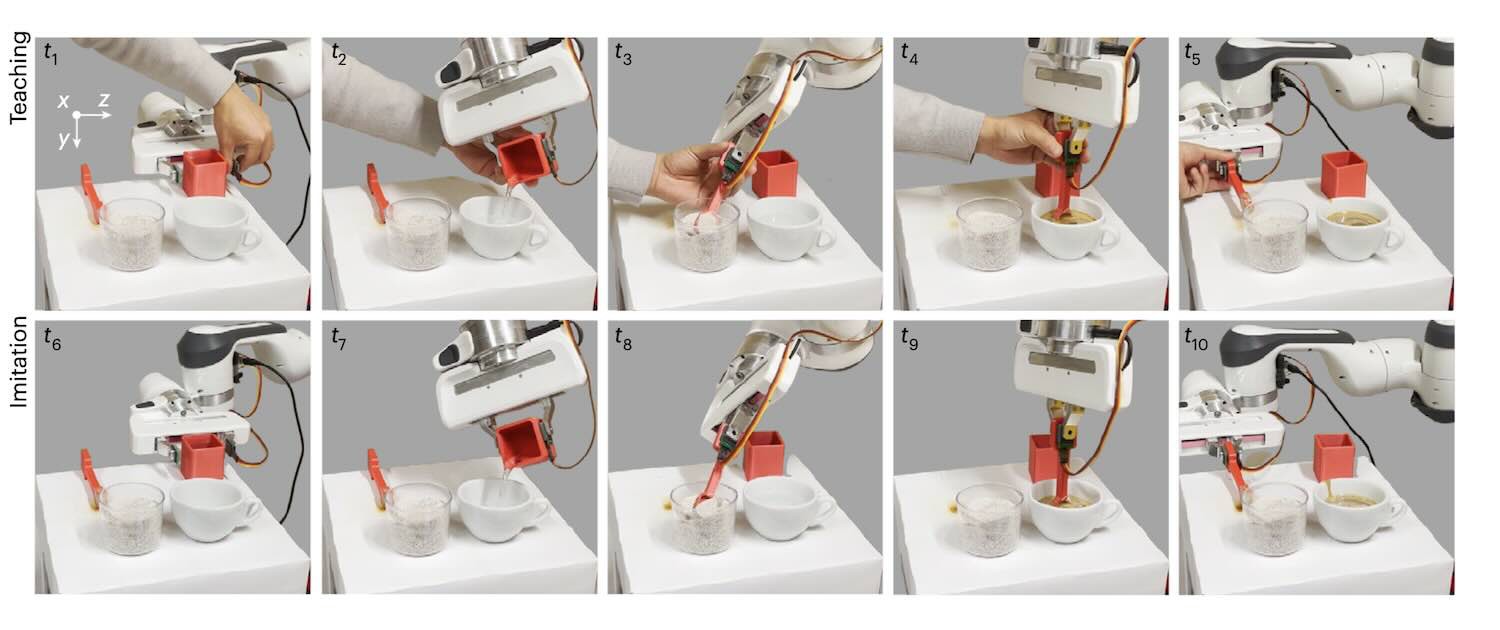
Lực và mô-men này sau khi được nhân với một ma trận tăng ích (gain matrix) sẽ lần lượt được chuyển đổi thành các gia số chuyển động (di chuyển + xoay) của cơ cấu chấp hành ở đầu cuối của cánh tay robot, đồng thời cập nhật tư thế đầu cuối của cánh tay thông qua một bộ điều khiển trở kháng (impedance controller).
Việc đóng mở kẹp cơ học có thể được điều khiển bằng các tín hiệu xúc giác được lập trình cụ thể, chẳng hạn như trượt nhanh lên xuống trên bề mặt cảm biến để điều khiển “đóng kẹp” hoặc lắc nhanh vật đang kẹp lên xuống để điều khiển “mở kẹp”.
Thông qua việc tương tác trực tiếp với cảm biến hoặc vật thể đang được kẹp, cánh tay robot và kẹp cơ học có thể được điều khiển một cách chính xác để lần lượt thực hiện các thao tác như cầm cốc nước và rót nước.


Cũng như múc bột cà phê ra, khuấy cà phê rồi trả lại thìa cà phê.
Trong quá trình này, đội ngũ giảng viên không cần nhấn nút giảng dạy (tức là phương pháp giảng dạy truyền thống) mà có thể tương tác trực tiếp với đối tượng, mang lại phương pháp giảng dạy trực quan và đơn giản hơn.

Sau khi kết thúc quá trình dạy, cánh tay robot và kẹp cơ học chỉ cần lặp lại các quỹ đạo chuyển động và trạng thái đóng/mở đã được ghi nhận trong quá trình dạy để hoàn thành việc pha cà phê. Các nhà nghiên cứu cho biết, do không sử dụng phản hồi hình ảnh nên trong giai đoạn lặp lại quỹ đạo, vị trí của tất cả các vật dụng phải giống với giai đoạn dạy. Tuy nhiên, việc tích hợp phản hồi hình ảnh và thuật toán AI trong tương lai sẽ cho phép học bắt chước trở nên thông minh và linh hoạt hơn.
Ngoài ra, thông qua lập trình, có thể chuyển đổi giữa chế độ dạy robot và chế độ kẹp tự thích nghi (tự động điều chỉnh lực kẹp theo phương pháp tuyến dựa trên lực tiếp xúc theo thời gian thực).

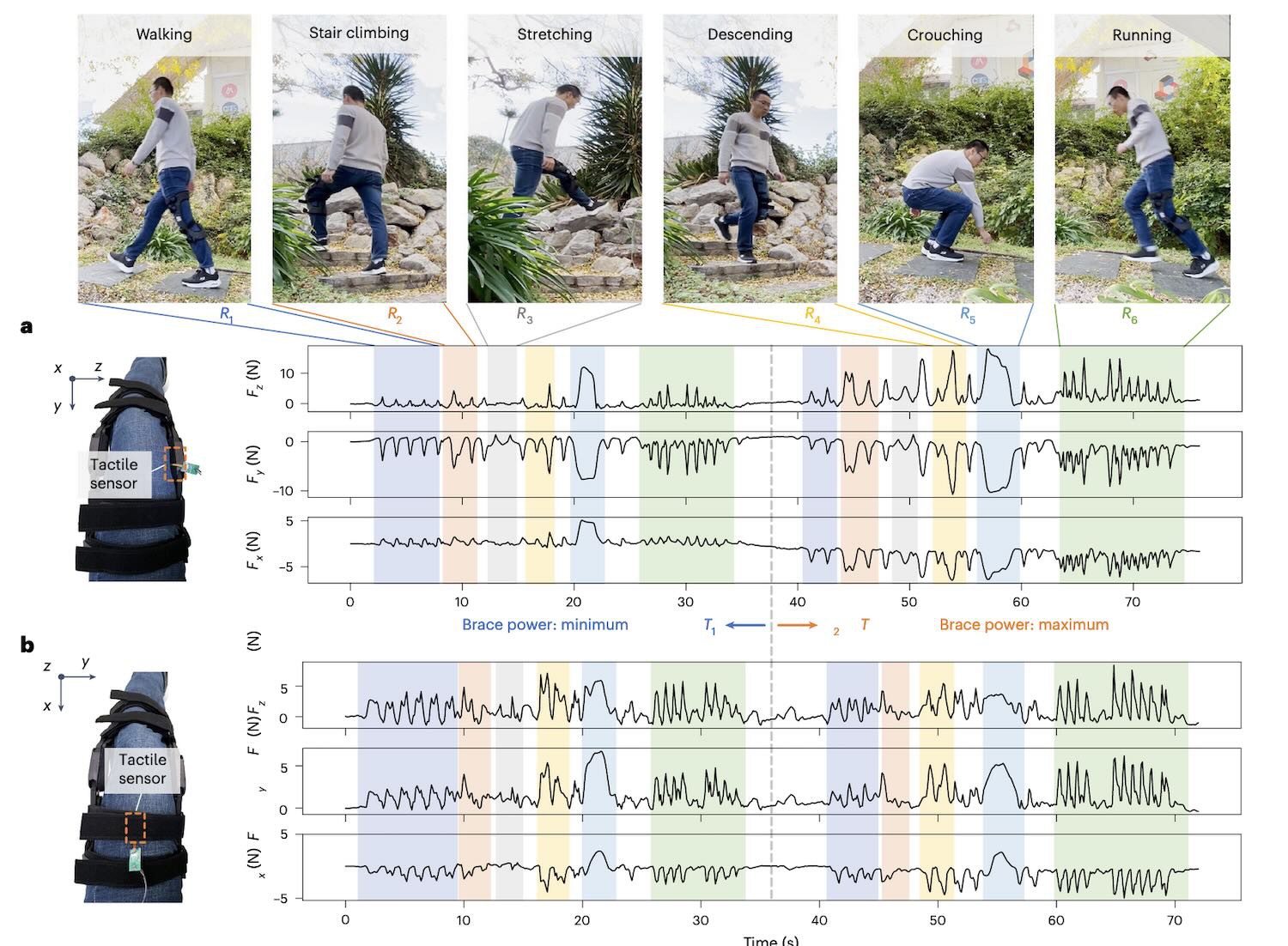
Các nhà nghiên cứu cũng đã trình bày ứng dụng của cảm biến xúc giác với đế PCB linh hoạt trong thiết bị đeo. Như minh họa trong hình dưới đây, bằng cách đặt một đơn vị cảm biến xúc giác có đế PCB linh hoạt ở mặt trong của đai hỗ trợ đầu gối (knee brace), chúng ta có thể theo dõi lực tiếp xúc ba chiều giữa đai hỗ trợ và chân của người dùng trong các hoạt động hàng ngày. Điều này cho thấy tiềm năng ứng dụng của cảm biến xúc giác ba chiều linh hoạt trong lĩnh vực theo dõi sức khỏe.
Nghiên cứu được thực hiện bởi các tác giả đến từ Phòng thí nghiệm CNRS-LIRMM thuộc Trung tâm Nghiên cứu Khoa học Quốc gia Pháp (CNRS), bao gồm tiến sĩ sau tiến sĩ Yǒu Càn Yán, Tiến sĩ Ahmed Zermane, Giáo sư Abderrahmane Kheddar, và Giáo sư Jiā Pān từ Đại học Hồng Kông.
Hiện nay, các loại cảm biến xúc giác linh hoạt phổ biến bao gồm:
• Cảm biến thị xúc giác: Được sử dụng rộng rãi trong nghiên cứu, cung cấp hình ảnh xúc giác có độ phân giải cao.
• Cảm biến xúc giác dựa trên áp trở hoặc điện dung: Có khả năng phát hiện phân bố áp lực và dễ dàng chế tạo.
Một vấn đề lớn với các cảm biến này là làm thế nào để sử dụng cấu trúc cảm biến đơn giản và phương pháp hiệu chuẩn hiệu quả để giải tách lực 3D (ba chiều). Điều này rất quan trọng, nhưng hiện nay, hầu hết các cảm biến vẫn có cấu trúc phức tạp, cần quá trình hiệu chuẩn tốn nhiều thời gian, khiến cho việc ứng dụng rộng rãi bị hạn chế.
Nhằm giải quyết vấn đề trên, các nhà nghiên cứu từ Trung tâm Nghiên cứu Khoa học Quốc gia Pháp (CNRS) và Đại học Hong Kong đã đề xuất một loại cảm biến xúc giác mới dựa trên màng từ linh hoạt.
• Bằng cách thiết kế mảng Halbach với từ hóa trực giao, cảm biến này có thể tự động giải tách lực 3D.
• Giải pháp giúp giảm độ phức tạp trong quá trình hiệu chuẩn từ bậc ba xuống bậc nhất, đơn giản hóa cấu trúc cảm biến và quy trình hiệu chuẩn.
Công nghệ này mở ra hướng đi mới cho các cảm biến xúc giác chi phí thấp, giúp dễ dàng ứng dụng vào thực tế. Đây là một bước tiến quan trọng trong việc phát triển các hệ thống robot với khả năng cảm nhận và tương tác linh hoạt hơn.
Kết quả nghiên cứu này đã được công bố trên tạp chí con của Nature là Nature Machine Intelligence với tiêu đề: “A soft skin with self-decoupled three-axis force-sensing taxels” (Da mềm với các điểm cảm biến lực ba trục tự giải tách).
Da xúc giác mềm tự giải tách lực ba chiều
1. Màng từ mềm
2. Lớp silicon đàn hồi
3. Bảng mạch PCB (tích hợp cảm biến Hall).
Khi màng từ biến dạng dưới tác động của lực bên ngoài, khoảng cách giữa màng từ và cảm biến Hall sẽ thay đổi. Do đó, cường độ và hướng của từ trường đo được bởi cảm biến Hall cũng thay đổi theo. Thông tin từ trường ba chiều này, sau khi được xử lý bằng thuật toán giải tách, có thể được chuyển đổi thành thông tin lực ba chiều.
Các nghiên cứu trước đây đã chỉ ra rằng mảng Halbach từ hóa sóng sin đa cực một mặt có đặc tính tự giải tách hai chiều. Cụ thể, trong mặt phẳng x-z:
• Cường độ từ trường (B) chỉ phụ thuộc vào hướng z.
• Hướng từ trường (RB) chỉ phụ thuộc vào hướng x.
Nhờ đặc tính này, Halbach có thể được sử dụng để tự giải tách lực trong hai chiều.
Do từ trường tuân theo nguyên lý chồng chất, các nhà nghiên cứu đã phát hiện rằng, khi xếp chồng trực giao hai mảng Halbach từ hóa sóng sin, đặc tính tự giải tách lực hai chiều có thể được mở rộng lên ba chiều trong những điều kiện nhất định thông qua các phép đơn giản hóa.
Tức là B chỉ phụ thuộc vào hướng z, Rxz chỉ phụ thuộc vào hướng x, và Ryz chỉ phụ thuộc vào hướng y. Độ sai số tuyệt đối chuẩn hóa (NAE) trước và sau khi đơn giản hóa của B, Rxz, Ryz lần lượt là 2.88%, 3%, và 4.56%.
Dựa trên đặc tính tự giải tách ba chiều của mảng Halbach từ hóa trực giao, ba thành phần lực ba chiều Fz, Fx, và Fy có thể được giải tách tương ứng thông qua các thông số B, Rxz, và Ryz.
Để kiểm chứng tính khả thi của phương pháp tự giải tách lực ba chiều này, các nhà nghiên cứu đã thiết kế và chế tạo ba cảm biến xúc giác có hình dạng, kích thước, dải đo và độ nhạy khác nhau, nhằm đáp ứng các ứng dụng thực tiễn đa dạng.
Đo phân bố lực ba chiều trên khớp gối nhân tạo
Ứng dụng đầu tiên là đo lường phân bố lực ba chiều tại vị trí khớp gối nhân tạo.
Khớp gối được chế tạo bằng công nghệ in 3D, gồm hai phần:
• Phần dưới tích hợp cảm biến xúc giác (gồm 24 đơn vị cảm biến) và cảm biến lực/mô-men sáu chiều ATI.
• Phần trên được điều khiển bởi cánh tay robot để mô phỏng chuyển động gập và trượt của khớp gối người.
Robot haptic làm cà phê
Một ứng dụng khác là dạy robot làm cà phê dựa trên cảm giác xúc giác.
Như minh họa trong hình dưới đây, các nhà nghiên cứu đã lắp đặt một mảng cảm biến xúc giác 3x3 có khả năng phát hiện lực và mô-men tại một đầu của gắp cơ học (điểm đo mô-men là trung tâm của cảm biến). Khi người vận hành chạm nhẹ hoặc trượt trên bề mặt của cảm biến, cảm biến sẽ phát hiện được lực và mô-men tương ứng theo hướng đó.
Việc đóng mở kẹp cơ học có thể được điều khiển bằng các tín hiệu xúc giác được lập trình cụ thể, chẳng hạn như trượt nhanh lên xuống trên bề mặt cảm biến để điều khiển “đóng kẹp” hoặc lắc nhanh vật đang kẹp lên xuống để điều khiển “mở kẹp”.
Thông qua việc tương tác trực tiếp với cảm biến hoặc vật thể đang được kẹp, cánh tay robot và kẹp cơ học có thể được điều khiển một cách chính xác để lần lượt thực hiện các thao tác như cầm cốc nước và rót nước.
Cũng như múc bột cà phê ra, khuấy cà phê rồi trả lại thìa cà phê.
Trong quá trình này, đội ngũ giảng viên không cần nhấn nút giảng dạy (tức là phương pháp giảng dạy truyền thống) mà có thể tương tác trực tiếp với đối tượng, mang lại phương pháp giảng dạy trực quan và đơn giản hơn.
Ngoài ra, thông qua lập trình, có thể chuyển đổi giữa chế độ dạy robot và chế độ kẹp tự thích nghi (tự động điều chỉnh lực kẹp theo phương pháp tuyến dựa trên lực tiếp xúc theo thời gian thực).
BÀI MỚI ĐANG THẢO LUẬN
