Tiến bộ quan trọng trong nghiên cứu cảm biến, Độ chính xác nhận biết lực của cánh tay robot đạt 6 mN
Vn-Z.vn ngày 26 tháng 11 năm 2024, nhóm nghiên cứu của Phó Giáo sư Đổng Nhị Bảo thuộc Khoa Khoa học Kỹ thuật, Đại học Khoa học và Công nghệ Trung Quốc, và Viện Nghiên cứu Robot Hình Người đã phối hợp với nhóm của Phó Giáo sư Vu Hân Cách từ Đại học Thành phố Hồng Kông, công bố trực tuyến bài báo nghiên cứu có tiêu đề “A tactile perception method with flexible grating structural color” trên tạp chí quốc tế National Science Review vào ngày 15 tháng 11. Các nhà khoa học đã đạt được tiến bộ quan trọng trong nghiên cứu cảm biến, Độ chính xác nhận biết lực của cánh tay robot đạt 6 mN.
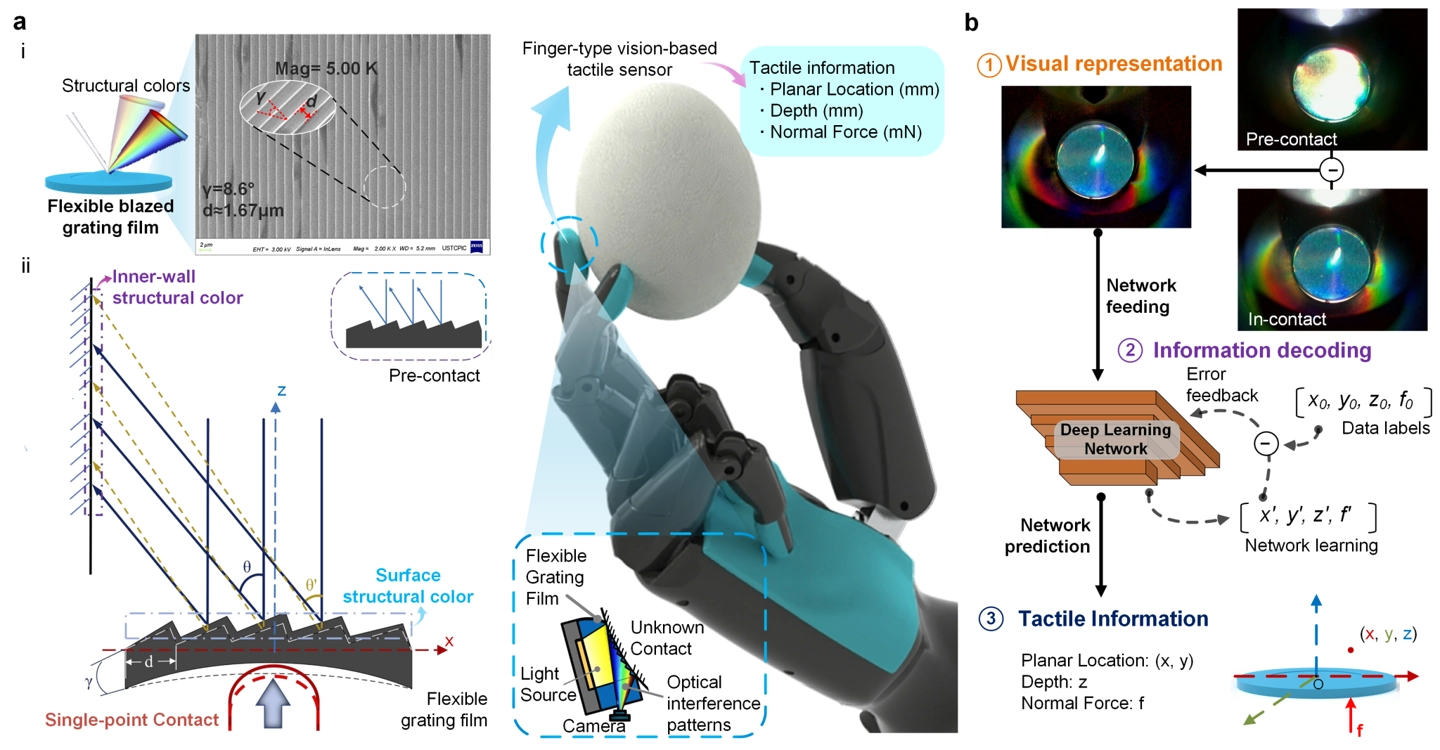
Nghiên cứu này đã đề xuất một phương pháp cảm nhận xúc giác mới dựa trên hiện tượng cấu trúc màu từ lưới quang linh hoạt, đạt được những bước đột phá quan trọng về độ phân giải định vị điểm tiếp xúc và độ chính xác nhận biết lực trong cảm biến xúc giác.
Cảm biến xúc giác là một trong những bộ phận cốt lõi quan trọng giúp robot thực hiện các thao tác phức tạp và tinh vi. Những năm gần đây, cùng với sự phát triển nhanh chóng của công nghệ thị giác máy, các cảm biến xúc giác dựa trên nguyên lý nhận biết thị giác (còn gọi là cảm biến xúc giác thị giác) đã trở thành một hướng nghiên cứu quan trọng trong lĩnh vực cảm nhận xúc giác. Tuy nhiên, các cảm biến xúc giác thị giác hiện tại chủ yếu dựa vào thông tin quang học hình học hoặc công nghệ theo dõi điểm đánh dấu, dẫn đến hạn chế nghiêm trọng về độ phân giải và độ chính xác trong việc nhận biết vị trí và lực tiếp xúc.
Để giải quyết vấn đề này, nhóm nghiên cứu đã lấy cảm hứng từ hiện tượng cấu trúc màu sinh học, sáng tạo sử dụng màng lưới quang linh hoạt tạo ra các mẫu cấu trúc màu dưới ánh sáng trắng làm thông tin biểu diễn xúc giác. Kết hợp với thuật toán học sâu để xử lý dữ liệu, họ đã đạt được khả năng cảm nhận vị trí điểm tiếp xúc với độ nhạy và độ phân giải cao.
Kết quả thí nghiệm cho thấy, phương pháp cảm nhận xúc giác thị giác dựa trên cấu trúc màu từ lưới quang linh hoạt này tận dụng triệt để thông tin biểu diễn xúc giác phong phú ẩn chứa trong các mẫu cấu trúc màu, vượt trội hơn hẳn so với các công nghệ cảm nhận xúc giác thị giác hiện tại về độ phân giải không gian trong định vị điểm tiếp xúc và độ chính xác nhận biết lực pháp tuyến. Về tổng thể, cảm biến này đạt độ chính xác lực pháp tuyến là 6 mN (lực vuông góc với bề mặt tiếp xúc), độ phân giải không gian trên mặt phẳng là 79 μm, và độ phân giải độ sâu tiếp xúc là 25 μm.
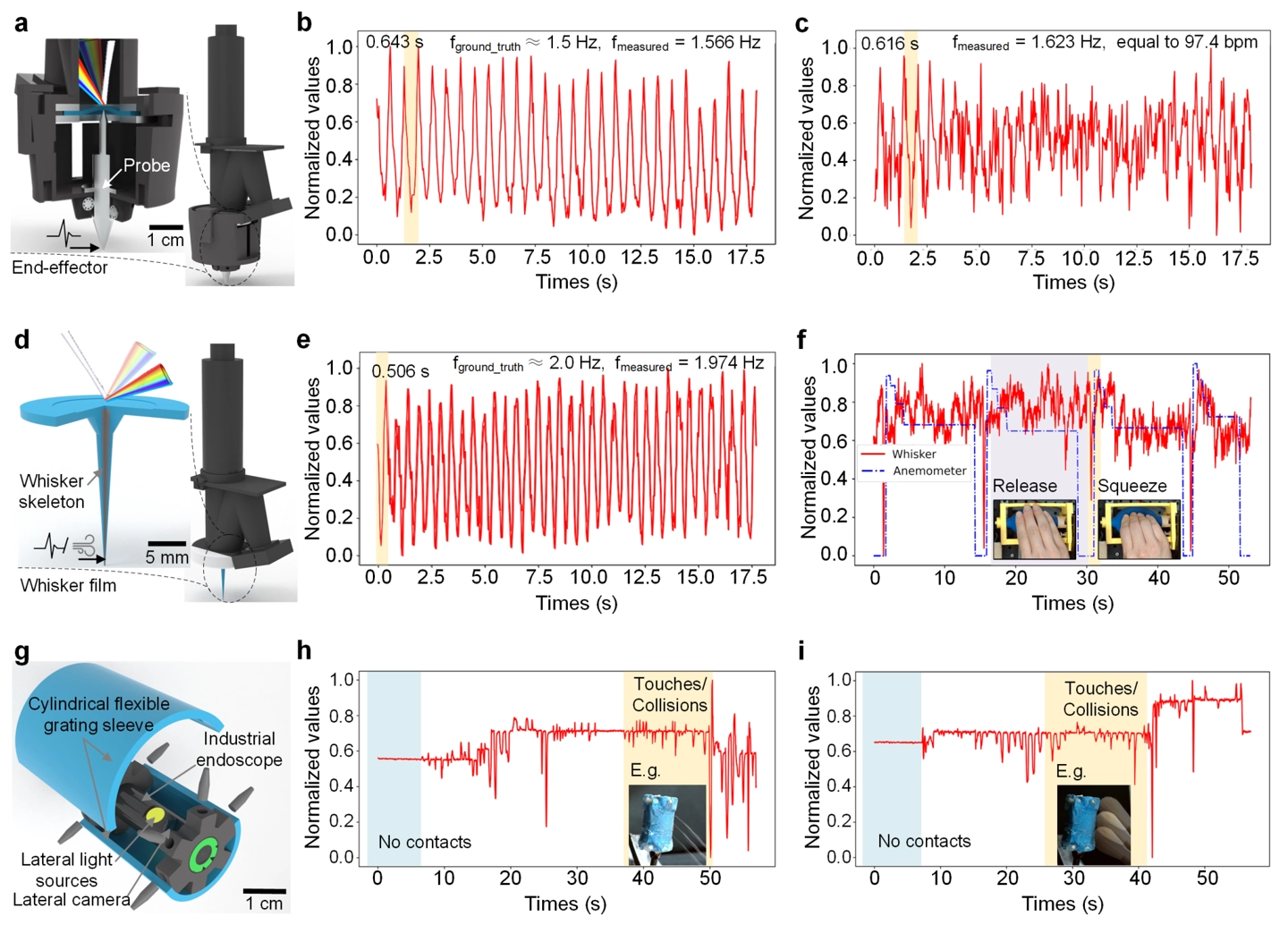
Ngoài ra, phương pháp cảm nhận xúc giác dựa trên cấu trúc màu từ lưới quang linh hoạt còn thể hiện khả năng ứng dụng mở rộng vượt trội. Dựa trên thiết kế mô-đun của các thành phần cốt lõi, nhóm nghiên cứu đã phát triển các nguyên mẫu cảm biến phục vụ ba ứng dụng điển hình:
• Cảm biến dao động độ nhạy cao, có khả năng phát hiện chính xác các tín hiệu dao động tần số thấp.
• Cảm biến xúc giác dạng râu sinh học, nhạy bén trong việc cảm nhận dao động tần số thấp và nhiễu động từ luồng khí.
• Hệ thống cảm biến xúc giác nội soi, có khả năng cảm nhận tiếp xúc ba chiều theo hướng vòng.
Các thí nghiệm đã xác nhận thêm tiềm năng ứng dụng rộng rãi của phương pháp cảm nhận xúc giác này trong các lĩnh vực như cảm nhận robot, giám sát môi trường, và thiết bị y tế.
Chi tiết bài báo nghiên cứu các bạn có thể tham khảo thêm tại đây
https://academic.oup.com/nsr/advance-article/doi/10.1093/nsr/nwae413/7901371
Nghiên cứu này đã đề xuất một phương pháp cảm nhận xúc giác mới dựa trên hiện tượng cấu trúc màu từ lưới quang linh hoạt, đạt được những bước đột phá quan trọng về độ phân giải định vị điểm tiếp xúc và độ chính xác nhận biết lực trong cảm biến xúc giác.
Cảm biến xúc giác là một trong những bộ phận cốt lõi quan trọng giúp robot thực hiện các thao tác phức tạp và tinh vi. Những năm gần đây, cùng với sự phát triển nhanh chóng của công nghệ thị giác máy, các cảm biến xúc giác dựa trên nguyên lý nhận biết thị giác (còn gọi là cảm biến xúc giác thị giác) đã trở thành một hướng nghiên cứu quan trọng trong lĩnh vực cảm nhận xúc giác. Tuy nhiên, các cảm biến xúc giác thị giác hiện tại chủ yếu dựa vào thông tin quang học hình học hoặc công nghệ theo dõi điểm đánh dấu, dẫn đến hạn chế nghiêm trọng về độ phân giải và độ chính xác trong việc nhận biết vị trí và lực tiếp xúc.
Để giải quyết vấn đề này, nhóm nghiên cứu đã lấy cảm hứng từ hiện tượng cấu trúc màu sinh học, sáng tạo sử dụng màng lưới quang linh hoạt tạo ra các mẫu cấu trúc màu dưới ánh sáng trắng làm thông tin biểu diễn xúc giác. Kết hợp với thuật toán học sâu để xử lý dữ liệu, họ đã đạt được khả năng cảm nhận vị trí điểm tiếp xúc với độ nhạy và độ phân giải cao.
Kết quả thí nghiệm cho thấy, phương pháp cảm nhận xúc giác thị giác dựa trên cấu trúc màu từ lưới quang linh hoạt này tận dụng triệt để thông tin biểu diễn xúc giác phong phú ẩn chứa trong các mẫu cấu trúc màu, vượt trội hơn hẳn so với các công nghệ cảm nhận xúc giác thị giác hiện tại về độ phân giải không gian trong định vị điểm tiếp xúc và độ chính xác nhận biết lực pháp tuyến. Về tổng thể, cảm biến này đạt độ chính xác lực pháp tuyến là 6 mN (lực vuông góc với bề mặt tiếp xúc), độ phân giải không gian trên mặt phẳng là 79 μm, và độ phân giải độ sâu tiếp xúc là 25 μm.
Ngoài ra, phương pháp cảm nhận xúc giác dựa trên cấu trúc màu từ lưới quang linh hoạt còn thể hiện khả năng ứng dụng mở rộng vượt trội. Dựa trên thiết kế mô-đun của các thành phần cốt lõi, nhóm nghiên cứu đã phát triển các nguyên mẫu cảm biến phục vụ ba ứng dụng điển hình:
• Cảm biến dao động độ nhạy cao, có khả năng phát hiện chính xác các tín hiệu dao động tần số thấp.
• Cảm biến xúc giác dạng râu sinh học, nhạy bén trong việc cảm nhận dao động tần số thấp và nhiễu động từ luồng khí.
• Hệ thống cảm biến xúc giác nội soi, có khả năng cảm nhận tiếp xúc ba chiều theo hướng vòng.
Các thí nghiệm đã xác nhận thêm tiềm năng ứng dụng rộng rãi của phương pháp cảm nhận xúc giác này trong các lĩnh vực như cảm nhận robot, giám sát môi trường, và thiết bị y tế.
Chi tiết bài báo nghiên cứu các bạn có thể tham khảo thêm tại đây
https://academic.oup.com/nsr/advance-article/doi/10.1093/nsr/nwae413/7901371
BÀI MỚI ĐANG THẢO LUẬN
